1.チェビシェフリンク機構

どのように動くかのアニメーションは近日中に掲載いたします。
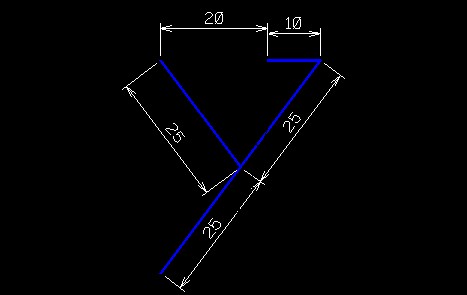
上の図にあるような、比率で機構を組むと、早戻り機構、擬似直線運動機構が実現されます。脚機構を考えるときに最もよいと考えられるのが、早戻り機構です。次に直線運動機構があるとより一層安定した歩行を実現することができ、チェビシェフリンクは優れているのではないかなと思います。しかし、欠点もあります。この機構で得られる直線運動部分は直接的に脚としては使用できないのです。つまり、この機構だけでは脚にはならないということであり、工作が難しくなってしまいます。
リンクの数が増えるということは、精度が重要になってきます。小さな誤差が積み重なり最終的には大きな誤差となってしまうからです。この機構を採用した場合は、工作技術が必要になります。 |
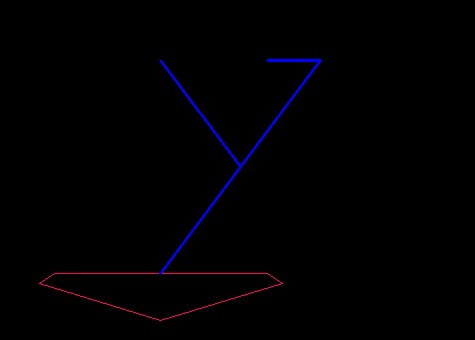
| 上の図にある赤い線が軌道線になります。上側ではゆっくりと動きしかも直線運動になります。下側では早戻りになります。この機構の上側部分を設置部分として使いたいのですが、このままではそれは不可能です。 |
|
|
| CADで見やすいように色の設定がされているので、動画にすると見えにくいとおもいますが・・・イメージはできるのではないかと思います。 |
|
|
連絡 : 松田
