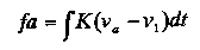
K:バネ定数
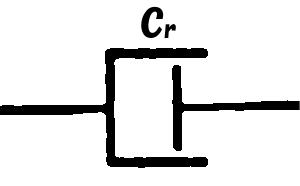
Cr,Cg:減衰係数
vi:速度
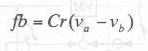
fi:力
機能モデルでモデル化するには、モデル化対象の持っている特性をそのまま現せばよい。

バネは、縮んだ(伸びた)量に比例した力が発生することは中学、高校の物理で習いました。縮んだ(伸びた)量、位置というのは速度を積分することで求まることは、高校、大学の物理で習いました。入力を速度としたとき、入力される速度は2つ考えられます。それはバネの両端の速度です。


バネの左端を固定して考えると分かりやすくなると思います。速度を積分すれば位置になるので気にせずに上の絵のようにしました。
V2がV1より大きいときはバネが引っ張られています。つまり、力は左方向に働くことになります。

配布資料にあわせて記号を変更しました。作者がどのよに座標を取るかによって変わってきます。今回は質量を基準とするため、質量が分かるく速度をVaを正とし、左端からくる速度V1を負として差をとる。

モデル化するとこのようになります。なんで?って感じですか?私はなんで?って感じです。